- Oct 28, 2025. Dr. ZHANG Yuanxi joined us as Postdoc. Welcome!
- Oct 27, 2025. Yichong’s work got accepted by TASE, congratulations!!
- Oct 23, 2025. Sam CHAN, JIANG Zixing, Wong Duncan Alexander win the gold award at WChina International College Students’ Innovation Competition 2025.
- Oct 23, 2025. Congratulations to all!! LUO Xiao’s work got IROS Best Paper Award on Robot Mechanisms and Design Finalists!

- Sep 19, 2025. Yichong’s work has been accepted by TRO as regular work, congratulations!!
- Aug 29, 2025. Dr Yang Yi will join us as postdoc starting from next Monday. Welcome!
- Aug 26, 2025. Dr. Li Haihong’s work on soft actuator modeling has been accepted by TIE. Congratulations!
- Aug 21, 2025. Ruoyu joined us as Research Assistant Professor today, Congratulations!
- Aug 1, 2025. Celebrating BIG today! Our Professor has been promoted to Full PROFESSOR. Congratulations, Professor Li ! ! !
- July 31, 2025. Welcome yimou joining us as Mphil.
- July 31, 2025. Welcome Xie Ronghao to our group as a PhD student!
- July 31, 2025. Congratulations to Xiao for his successful defence!
- July 23, 2025. Congratulations to Sam for winning the 2nd runner-up of PCKKSCA!

- July 23, 2025. Welcome our new RA Mr. Jiang Peijie from SIAT.
- July 8, 2025. Welcome Dr. Wang Jie from Tsinghua University. He will join our group as postdoc in July.
- July 8, 2025. Congratulations to Ben for his successful viva!
- June 26, 2025. Ben’s work has been accepted by AIS, congratulations!!
- June 16, 2025. Four papers got accepted by IROS today, congratulations to Luo Xiao, Yitian, Dr. Cui Zhiwei and Dr.Li Shunlei.
- June 16, 2025. Welcome Kevin, our Mphil student in the coming semester!
- May 31, 2025. Congratulations! SAM CHAN won First Prize in The 11th Hong Kong University Student Innovation & Entrepreneurship Competition. We are thrilled to announce that Sam Chan (Chan Wai Shing) and his teammate Wong Duncan Alexander have secured the First Prize at The 11th Hong Kong University Student Innovation and Entrepreneurship Competition. Representing CUHK, their winning project – the “Magnetic Countertraction System for Endoscopic Submucosal Dissection in Gastrointestinal Tract” – demonstrates groundbreaking innovation in medical technology. This prestigious award recognizes their exceptional work in developing solutions for complex endoscopic procedures.

- May 26-28,2025. CUHK Shanghai Center Visiting
CUHK-Supported Team Showcases Breakthrough Medical Innovation
Building on strengthened CUHK-Shanghai academic ties emphasized in the Vice-Chancellor’s recent address, our team achieved a milestone success. Led by Prof. Li Zheng with student Sam Chan, we demonstrated the novel “System and Method for Endoluminal Tissue Manipulation”. The innovation garnered significant acclaim from experts, reflecting tangible progress in our collaborative research ecosystem. This breakthrough exemplifies how deepened institutional partnerships accelerate impactful healthcare solutions. As the Vice-Chancellor noted, such cross-border synergies are “harvesting success through stronger ties,” positioning CUHK and Shanghai at the forefront of medical technology co-creation. (link)

- May 9, 2025. Warm congratulations to SAM CHAN on the successful completion of the first clinical trial!
- April 2, 2025. Warm congratulations to Luo Xiao on the successful completion of the first clinical trial!
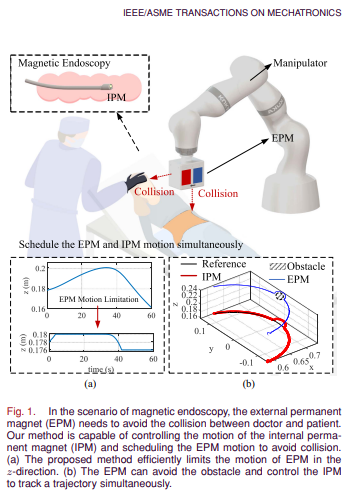
- Mar 18, 2025. Ruoyu’s paper has been accepted by TMECH, Congratulations!! Ruoyu Xu developed a novel Whole-Body Model Predictive Control (MPC) for robotic endoscopes. This method simultaneously controls the internal magnet (IPM) for precise navigation and constrains the external magnet (EPM) manipulator’s motion for obstacle avoidance and safety, overcoming limitations of prior hierarchical approaches. Our Real-Time Iteration MPC (RTIMPC) achieves computation at 30 Hz, validated in colon phantom experiments. This significantly enhances the safety and feasibility of magnetic endoscopic procedures.(link).
- Mar 18, 2025. Three projects entered the PCKKSCA finalist, including the brain biopsy robot, the prostate biopsy robot project and the magnetic retractor. Congratulations to the team members and wish them best luck in the final!
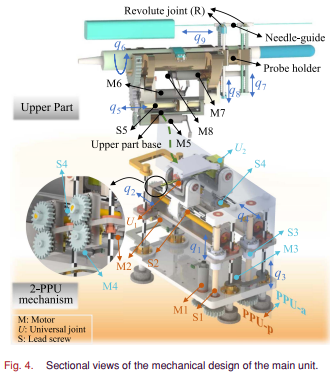
- Mar 3, 2025. Congratulations! Luo Xiao’s work has been accepted by TMech! LUO Xiao has developed a novel 9-DoF robotic system for Transperineal Prostate Biopsy (TPPB). This breakthrough features a compact serial-parallel hybrid mechanism (Core: 33cm x 20cm x 33cm) with dual programmable RCM constraints (needle & probe), enabling precise access to the entire prostate while keeping the needle visible in the ultrasound plane. Experimental validation shows exceptional accuracy: probe-RCM motion error ≤ 0.65 mm/0.58° and needle-RCM error ≤ 0.69 mm, significantly improving safety and reducing patient trauma compared to manual methods.(link)
- Feb 20, 2025. Congratulations! Our project on magnetic retractor received the WIPO National Award for Inventors and Gold Award with congratulations from jury! Well done Sam and all the team!
Our Team’s Breakthrough in GI Surgery Wins Top Int’l Honors
Led by SAM (Project Lead) under Prof. Li Zheng’s supervision, our team earned the Jury’s Gold Medal + WIPO National Award at IIFME for the Endoscopic Magnetic Countertraction System. This revolutionary tech provides surgeons with “a second hand” via magnetic traction, slashing early GI cancer surgery time by 30% while boosting safety. Proud milestone for CUHK medical engineering!(link)


- Feb 17, 2025. Dr Max Ma joined us as postdoc today, welcome!!
- Feb 17,2025. Congratulations. First prize, energetic and creative performance in MRC Chinese New Year Lunch.
- Feb 12, 2025. Congratulations, Sam’s work has been accepted by DDW.
- Jan 28, 2025. Sam’s paper got accepted by ICRA.
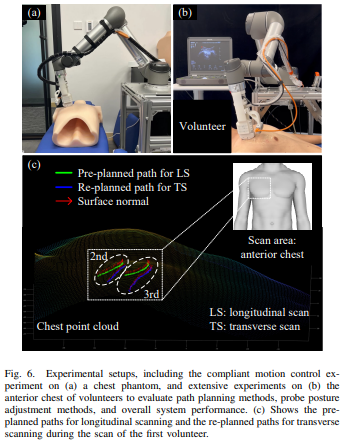
- Jan 28, 2025. Dr. Lei Long’s paper got accepted by TMRB. Congratulations!
Based on the groundbreaking research published in IEEE Transactions on Medical Robotics and Bionics, Dr. Long Lei have achieved a major milestone in lung ultrasound automation. Their novel robotic system performs fully autonomous longitudinal and transverse scans precisely along intercostal spaces. Key innovations include:
- Patient-specific path planning: Adapting standard anatomical models to individual patients for accurate intercostal scanning paths (a first).
- Real-time pleural line feedback: Continuously optimizing ultrasound probe posture during scans to ensure vertical pulse emission, critical for generating diagnostic A/B-line artifacts.
- Complete workflow: Enabling standardized, high-quality lung examinations, reducing clinician burden and infection risk. (link).
- Jan 22,2025. Welcome! Dr. Lei Long joined us today as a Postdoc!
- Jan 15, 2025. Yitian’s work got accepted by TMECH, congratulations!!
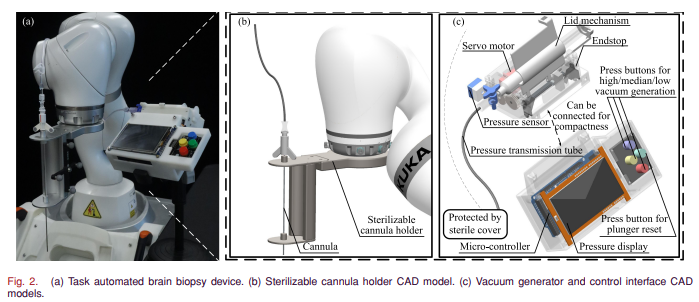
Yitian Xian spearheaded the work, a novel robotic system for stereotactic brain biopsy achieving unprecedented autonomy levels. resulting in:
- Level-2 Autonomy: A novel, sterilizable biopsy device automates cannula insertion and vacuum generation, ensuring surgical hygiene and reducing manual errors.
- Level-3 Safety-Critical Navigation: An advanced CLF-CBF-QP framework enables real-time, dynamic collision avoidance with surgeons and workspace constraints. We uniquely integrated Robo-centric ESDF with time-variant CBF for fast reaction to moving obstacles.
- Validated Performance: Experiments confirmed collision-free navigation during surgeon movement (avg. speed ~23 cm/s), high accuracy (1.54 mm position error), and successful biopsy sample acquisition on a swine model (sufficient tissue weight: 11.2-14.7 mg).
This advancement significantly enhances surgical safety, reduces neurosurgeon burden, and facilitates surgeon-robot collaboration.(link).
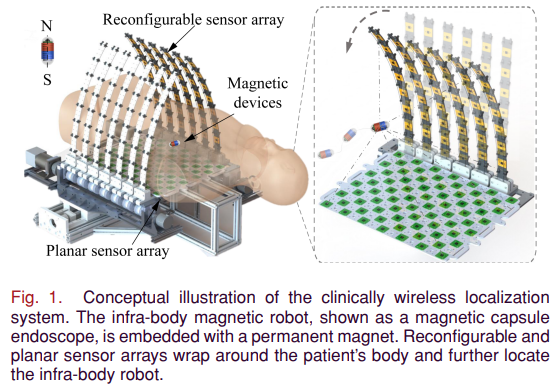
- Jan 2, 2025. Yichong’s work has been accepted by TMech, congratulations! Well done ! Led by Yichong Sun, our team developed a novel wireless localization system for magnetic medical robots. We integrated a cable-driven mechanism with flexible Hall-effect sensors to create a reconfigurable sensor array that adapts to diverse patient anatomies. This system achieved high static (0.0088 m) and dynamic (improved by 42.73-55.65%) localization accuracy. Critically, in-vivo animal trials in the esophagus demonstrated mm-level repetition accuracy (0.0054-0.0059 m) and clinical feasibility, paving the way for enhanced closed-loop control in robotic surgery. (link).